
Début de l’histoire alors que je cherchais quelques fichiers 3D prêts a être imprimés avec ma Reprap, lorsque je suis tombé par hasard sur ce modèle de bras robot sur thingiverse,
J’avais les servos et une arduino nano sous la main, intijk fournissait aussi un firmware acceptant des commandes basiques par série alors j’ai décidé de m’en monter un!
Quelques semaines de bidouille plus tard, il m’a permis de me familiariser avec processing en créant un programme qui peut le piloter sans avoir a entrer des coordonnées a la main… Et je vais vous en faire profiter ici.
Le logiciel de contrôle que j ai créé s’appelle A.R.C.S,
Il est composé d un programme pour windows, linux, normalement mac, si vous essayez sur un mac merci de me le faire savoir, je n ai pas eu l occasion de tester, il comprend aussi un firmware pour carte arduino, basé sur celui d’intijk mais hautement modifié!!, et des outils qui s’étofferont au fur et a mesure.
Il permet à l utilisateur de paramétrer son robot ( calibration), mais aussi de le contrôler de plein de façons différentes : souris, clavier, joystick, on peut même envisager d autres modes de contrôles plus exotiques, arcs est écrit avec processing et sera open source! Vous pourrez donc facilement comprendre comment le modifier pour l adapter a ce que vous voulez.
Il possède une interface de programmation de séquences par mémorisation de positions. En clair on peut mémoriser des « waypoints » que le robot reproduira seul. On peut même en paramétrer la vitesse sur chaque mouvement!
voici quelques screenshots:
-
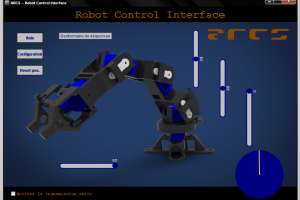
- Fenêtre principale
-
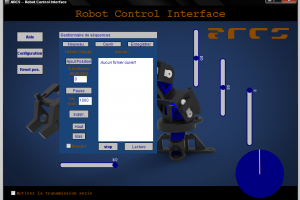
- Onglet de création de séquences
-

- Fenêtre de configuration
-
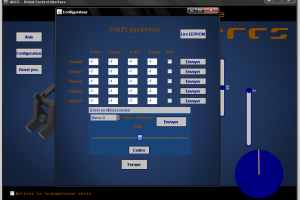
- Calibration des servomoteurs
-

- lecture/écriture XML intégrée pour support multilingue et sauvegarde de préférences.
Et une vidéo de démonstration du fameux robot éxécutant une séquence crée avec ARCS:
Je vais lancer très prochainement une campagne de financement participatif sur Kisskissbankbank.com durant laquelle seront disponibles des kits comprenant tout le nécessaire au montage du robot présenté ici, ceci pour financer le développement du logiciel.
Les détails de fabrication des kits sont réglés, reste a travailler encore la présentation sur le site, cela va donc arriver vite!
Après la campagne, les fichiers sources du programme et les fichiers 3d pour imprimer voire modifier le robot soi-même seront rendus publiques.
j’espère faire de ce petit programme un bon outil de découverte de la robotique accessible a tous.
pour être tenu informé, abonnez vous sur twitter @ARCS_robot
ou la page facebook: www.facebook.com/pages/ARCS/1406845236279075
plus d’articles a venir sur les détails du développement (épique!) de ce projet…